Robótica Industrial e Sistemas Inteligentes
É no Centro de Robótica Industrial e Sistemas Inteligentes que florescem soluções inovadoras para alavancar a robótica no contexto industrial, agrícola e florestal e impulsionar a transformação digital da indústria.
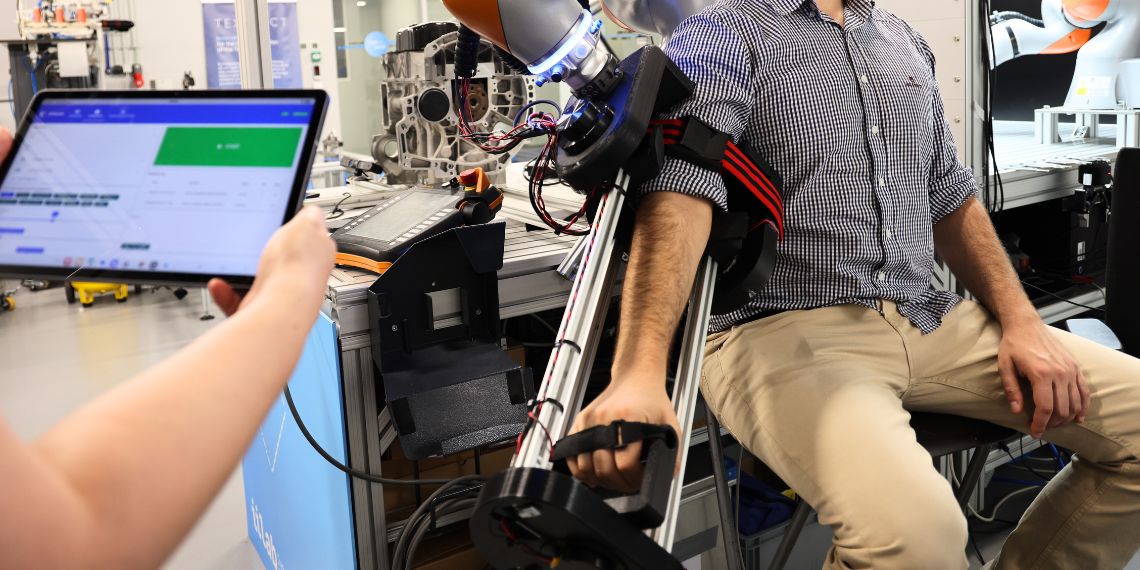
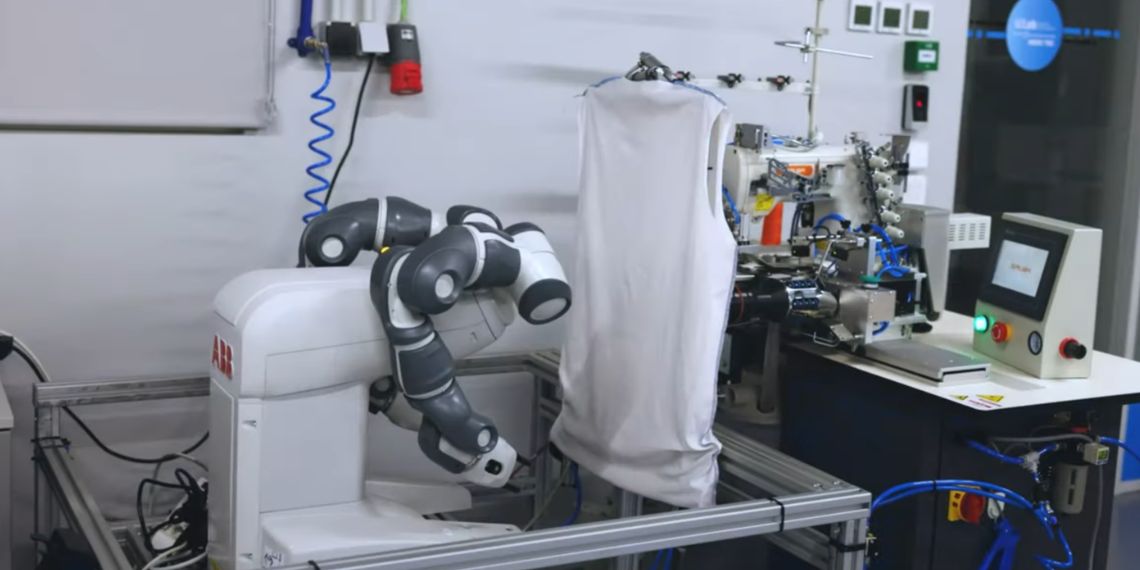
Seguimos uma abordagem prática – da conceção à implantação – para ensaiar a navegação e localização de robôs móveis, testar avanços na visão industrial 2D/3D e deteção avançada, sem descurar a robótica industrial e colaborativa, e interfaces humano-robô.
O nosso TRIBE LAB é terreno fértil para ideias inovadoras sobre a agricultura do futuro. Ali desenvolvemos protótipos e tecnologia de excelência em robótica agrícola e IoT: com protótipos, sensores avançados (LiDAR, câmaras AI) e ferramentas de prototipagem rápida, aceleramos o desenvolvimento de soluções para o setor agroflorestal. Marcamos ainda presença no iiLab, onde unimos investigação aplicada, demonstração tecnológica e testes em ambiente controlado, promovendo a integração de tecnologias emergentes na indústria. Desde células robóticas inteligentes e sistemas ciberfísicos até à análise de dados e IA, é um espaço de inovação onde as empresas podem experimentar e validar soluções para a fábrica do futuro.
Com uma equipa multidisciplinar e alinhado com agendas europeias, o nosso trabalho de investigação combina ciência fundamental e aplicação com impacto no desenho de soluções para a indústria 4.0, promovendo a competitividade e a transformação digital do setor.