Veículos autónomos em desenvolvimento no INESC TEC
O projeto FLEXUS - Flexible Unmanned Surface Vehicles for the Internet of Moving Things, desenvolvido através de uma colaboração entre o Centro de Robótica e Sistemas (CRAS) e o Centro de Telecomunicações e Multimédia (CTM), ambos pertencentes ao INESC TEC, tem como objetivo fornecer um conjunto de dez veículos de superfície autónomos, capazes de executar missões remotamente projetadas e descarregadas por experimentadores através da Internet.
15 novembro 2016
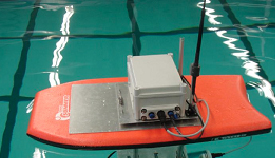
Os subsistemas do primeiro veículo estão atualmente a ser integrados e serão testados muito em breve.
Os veículos de superfície autónomos, ou USVs (Unmanned Surface Vehicles), são plataformas robóticas de dimensões reduzidas, podendo ser facilmente transportáveis e manuseadas por um único operador. As missões típicas destes veículos abrangem desde posicionamento estático até movimento coordenado em formação, podendo as missões estender-se por alguns quilómetros. Neste cenário, para que seja possível comunicar entre si e com os operadores, os USVs contam com soluções de comunicação inovadoras que exploram várias bandas de frequências de rádio.
Esta ideia insere-se no paradigma da revolução da Internet das Coisas (Móveis), que pretende conectar dispositivos eletrónicos utilizados no dia-a-dia à Internet. A contribuição do INESC TEC pretende facilitar experiências com plataformas robóticas a utilizadores que não têm necessariamente de se encontrar na proximidade deste equipamento para realizar testes ou recolher dados com relevância.
Bruno Ferreira, do CRAS, é o responsável técnico deste projeto, que arrancou em setembro de 2016 e tem duração de 30 meses. Após a fase inicial de entrega dos veículos, arranca um período de formação às equipas que operarão os veículos, além do acompanhamento do projeto através de assistência remota e da concretização de algumas experiências.
A iniciativa surgiu de uma proposta submetida ao programa europeu Horizonte 2020 designada RAWFIE (Road-, Air-, Water-based Future Internet Experimentation), concretizada com a integração do INESC TEC num grupo de 13 organizações parceiras de oito países da União Europeia, e tem como propósito desenvolver uma plataforma única que integre bancos de testes de veículos não tripulados para a experimentação de pesquisa em ambientes terrestre, aéreo e marítimo.
O investigador mencionado nesta notícia tem vínculo ao INESC TEC.