Novo projeto de sistemas robóticos de paletização adaptativos e modulares
O INESC TEC, através do Centro de Robótica Industrial e Sistemas Inteligentes (CRIIS) e do Centro de Engenharia de Sistemas Empresariais (CESE), promove o projeto AdaptPack, em conjunto com a empresa JPM – Automação Industrial e o INEGI (Instituto de Ciência e Inovação em Engenharia Mecânica e Engenharia Industrial).
18 janeiro 2018
O objetivo deste projeto é investigar e desenvolver um framework focado no desenvolvimento de novos equipamentos robóticos para embalagem/paletização de produtos, que possibilitará o desenvolvimento ágil de sistemas, por um lado, totalmente adaptáveis ao manuseamento de produtos com diferentes formatos e, por outro, com uma arquitetura modular de elevada flexibilidade. Com estas medidas pretende-se reduzir significativamente os tempos de conceção, construção e montagem de novos equipamentos.
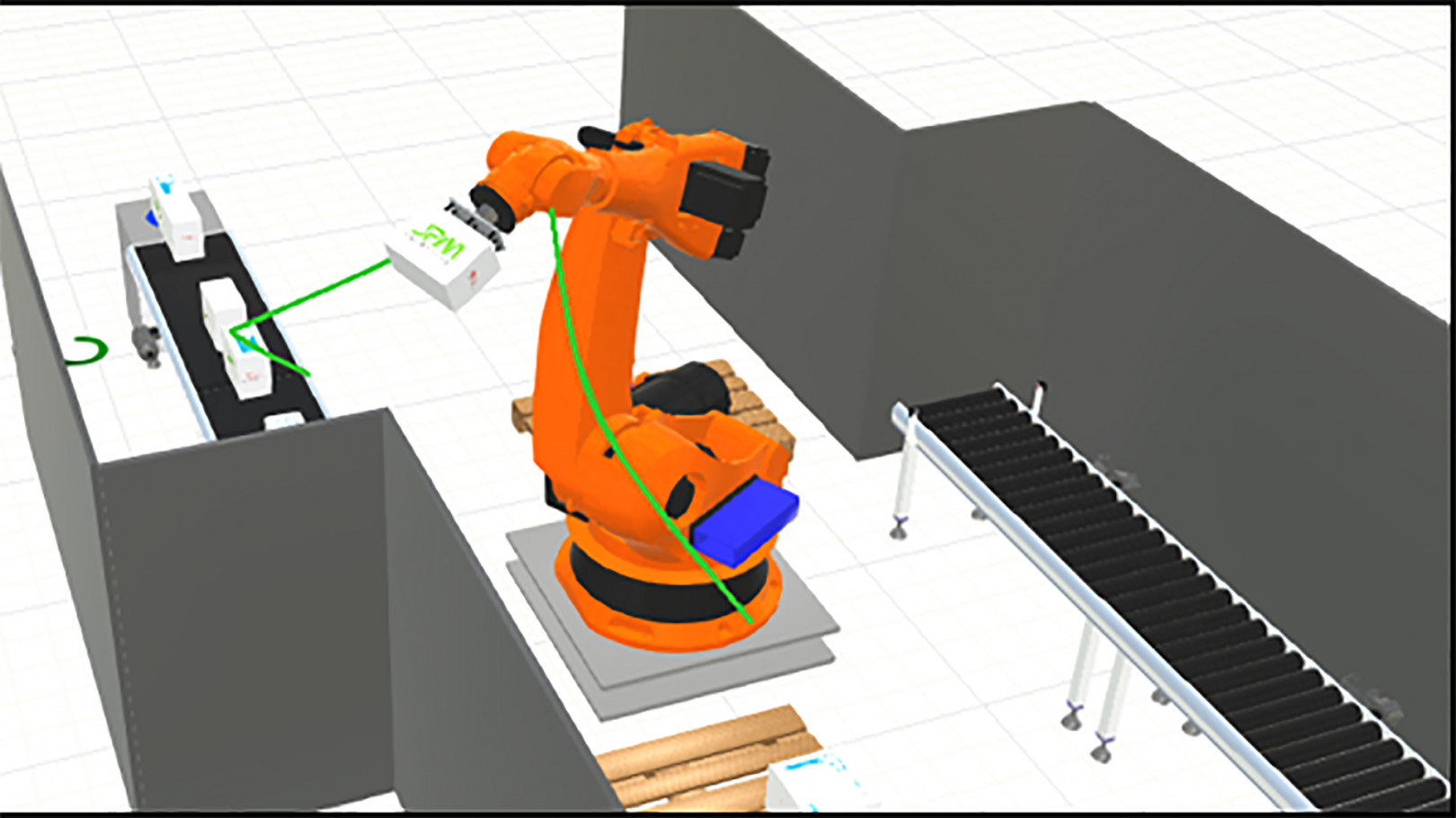
AdaptPack Studio é o nome da plataforma a ser desenvolvida pelo INESC TEC, que, em ambiente de simulação 3D, deverá ser capaz de criar soluções de paletização, sobre o qual corre um acelerador de programação de robôs industriais, que vai gerar automaticamente as trajetórias necessárias para os robôs procederem às tarefas de paletização com uma intervenção mínima do utilizador.
Em paralelo, está também a ser desenvolvido um modelo que otimiza a colocação de embalagens em paletes, considerando diferentes características dos produtos e dimensão, estabilidade e segurança da palete. Para integrar estes módulos, está a ser desenhado um controlador inteligente que permita uma interface com os robôs simples e facilitada, evitando erros ou práticas inúteis.
A equipa do projeto é coordenada por Pedro Ribeiro, do CESE, com a colaboração de Manuel Silva, do CRIIS, contando ainda com Luís Costa e Miguel Cabral, do CESE, e Luís Rocha, Ricardo Silva, Pedro Relvas e Paulo Rebelo, do CRIIS.
Na conferência ROBOT'2017 – Third Iberian Robotics Conference, que decorreu entre 22 e 24 de novembro em Sevilha (Espanha), foi apresentado algum do trabalho já realizado, através do artigo científico “Off-line Programming of Collision Free Trajectories for Palletizing Robots”.
O Projeto AdaptPack é financiado pelo FEDER - Fundo Europeu de Desenvolvimento Regional, através do Programa Operacional de Competitividade e Internacionalização - COMPETE 2020, no âmbito do Acordo de Parceria PORTUGAL 2020 e através da Agência Nacional de Inovação.
Os investigadores mencionados na notícia têm vínculo ao INESC TEC e ao ISEP-IPP.